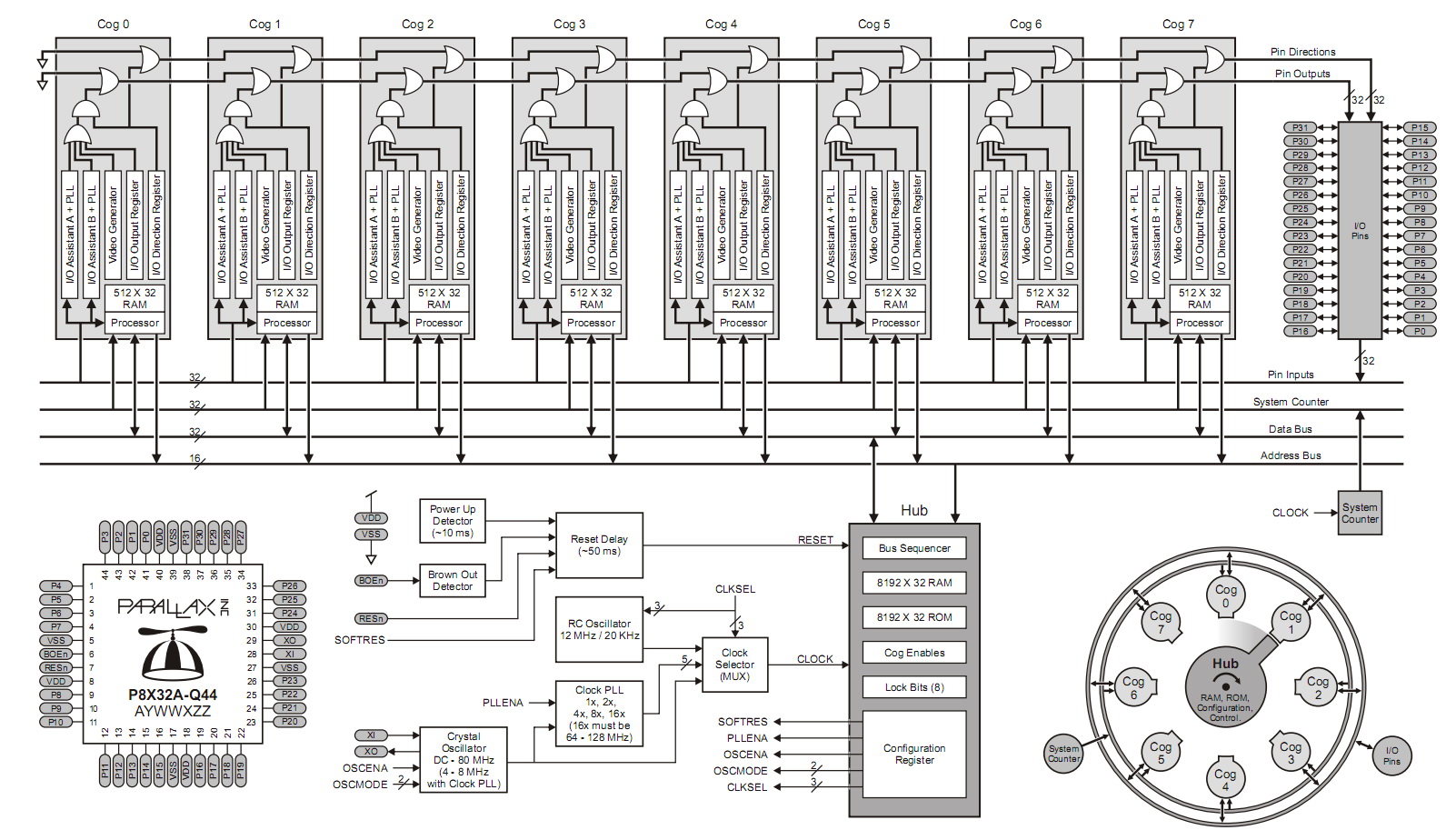
Wenn zwei Cog’s auf den gleichen Speicherbereich zugreifen verhindert der Propeller eigenständig Kollisionen wenn es sich nur um einzelne Byte, Wort oder Langwort Zugriffe handelt. Diese Zugriffe eines Cog’s werden erst abgearbeitet bevor der nächste Cog Zugriff bekommt.
Wenn ein Cog jedoch in einer Schleife einen Block von Daten schreibt und ein anderer Cog diesen Datenblock zugleich liest, kann der Propeller nicht mehr sicherstellen, das alle Daten beim lesen zuvor komplett geschrieben wurden, da die HUB Rotation einfach weiter läuft.
- Routinen die exclusiven Zugriff auf einen Hauptspeicherbereich benötigen benutzen den LOCKNEW Befehl der einen Wert zurückgibt (-1=ERROR ansonsten eine Lock-ID). Nur ein Cog sollte den LOCKNEW Befehl ausführen, dieser Cog sollte die Lock-ID auch an alle anderen Cog’s kommunizieren die diesen Speicherbereich benutzen
- Jeder Cog der auf diesen Speicherbereich zugreifen will muss zuvor erfolgreich die Lock-ID sperren. Ein erfolgreiches Sperren wird durch den Rückgabewert FALSE des LOCKSET (Lock-ID) Befehls angezeigt. Falls LOCKSET TRUE zurückgibt beansprucht gerade ein anderer Cog den Speicherbereich. Der Cog muss warten bis ein LOCKSET Befehl erfolgreich ist
- Der Cog der einen LOCKSET Befehl erfolgreich ausführt, kann den Speicherbereich nach belieben benutzen. Wenn dessen Bearbeitung fertig ist muss der Speicherbereich mittels LOCKCLR (Lock-ID) wieder freigegeben werden, damit andere Prozesse wieder auf den Speicherbereich zugreiffen können. In einem sauberen System kann der Rückgabewert von LOCKCLR ignoriert werden, solange der freigebende Cog der einzige mit der Berechtigung war, die Sperre aufzuheben.
- Wenn ein Speicherbereich nicht länger benötigt wird sollte die darauf bezogene Sperre mittels LOCKRET (Lock-ID) wieder zurückgegeben werden. Normalerweise geschieht das durch den Cog der den LOCKNEW Befehl gegeben hat.
Zu beachten ist, daß der Haupspeicherzugriff nicht wirklich geblockt wird. Weder vom HUB oder dem Lock. Es liegt also an den einzelnen Prozessen die Regeln einzuhalten. Auch ordnet der HUB einen LOCKNEW Befehl nicht dem aufrufenden Cog zu. Jeder andere Cog kann Locks wieder freigeben.